The goal of this thesis is to autonomously navigate an inexpensive, consumer grade quadcopter
like the Parrot's AR.Drone
to image a large scene (spread over multiplanar surfaces), and create an unrolled view.
This thesis proposes methods to solve some of the problems faced with quadcopter-based explorations.
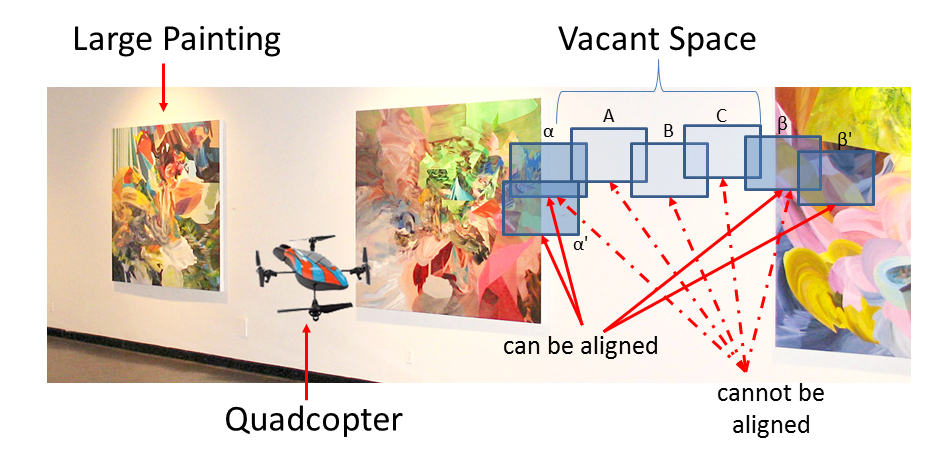
Mosaicing Scenes With Vacant Spaces
One of the major contribution of this piece of the thesis is a method to create a
mosaic of a scene containing vacant spaces using a
fusion of a standard vision-based stitching algorithm, with positional data captured from an IMU.
Read more ...
Vacant spaces are encountered in the imaging of this scene.
When individual portions
are captured by a quadcopter, how does one create the complete mosaic, given that common
features are unavailable? In this example, α and α' can be aligned, and so can β and β'. This
is not true for the constituents of the 5-tuple (α, A, B, C, and β).
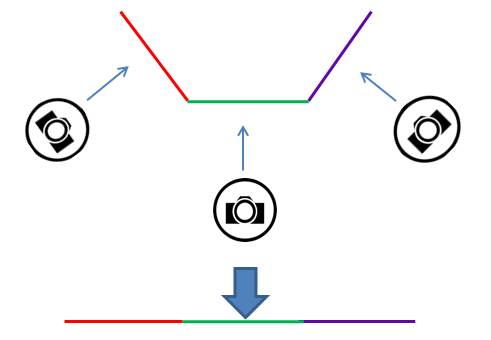
Imaging and Unrolling Multiplanar Surfaces
In many circumstances the input scene is spread over multiple planes.
In such cases, we would like to image each planar region orthographically (and then create individual mosaics), and later 'unroll'
the whole scene by joining the individual mosaics. In effect, we get the output mosaic of the
input scene as if it were present on a single plane. Read more ...
Imaging multiplanar scenes requires change in the orientation as well as position of camera.
In such cases, we output the unrolled view of the input scene.
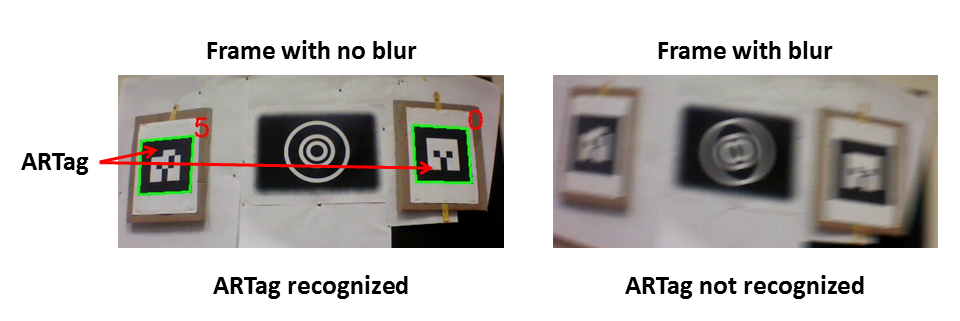
Recognizing Fiducials Under Blur
A single quadcopter is not sufficient for imaging large multiplanar scenes due
to energy constraints. Instead, one may use multiple quadcopters in
collaboration for imaging multiplanar scenes. In such cases, we have to identify
each quadcopter uniquely for realistic collaboration among multiple quadcopters. Read more ...
Fiducials
such as ARTag can be recognized (green rectangles) on the left, but cannot be
recognized (on the right) in the presence of motion blur.