We autonomously navigate the quadcopter along a computed path in order to capture a scene spread over multiple planes.
We also output the unrolled
view of the input scene by joining mosaics of individual planar surfaces.
Challenges
We need to capture the images from a short distance in order to get fine details; this implies we need to create a mosaic.
Manually controlling a quadcopter to image large planar regions by
keeping a constant distance from the imaging plane is very difficult.
A quadcopter has to be maneuvered such that it will cover
the large input scene as quickly as possible.
We require accurate 3D coordinates of the regions in real-time for doing efficient path planning.
Homography-based mosaicing algorithms can mosaic only if the captured images lie on a single plane.
Multiplanar imaging through quadcopter requires detection of multiplanar bounded regions in real-time.
Not only do we need the equations of the multiple planes, we also need their boundaries, so as to change the orientation of the quadcopter.
Existing methods for modelling plane equations do not output boundaries of the planes.
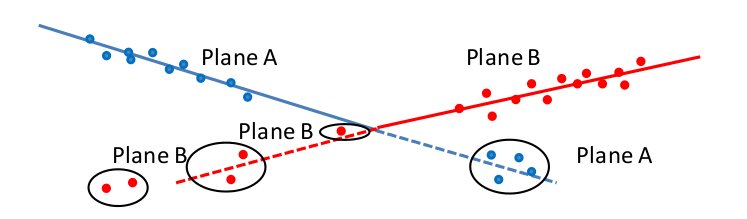
Also, existing methods cannot remove noisy points generated by erroneous PTAM
as shown in Figure.
Problem in plane estimation. Points marked by black ovals
satisfy the equation of the least cost plane, but are actually a part of a different plane.
Contributions
An extended PTAM initialization which ensures scale accuracy for getting accurate 3D map of surrounding environment.
A real-time algorithm to estimate the multiple bounded planar regions from 3D feature points.
A path planning algorithm which calculates optimal number of positions to encompass complete multiplanar scene.
A method which combines mosaics from individual planar regions, to create an unrolled
view
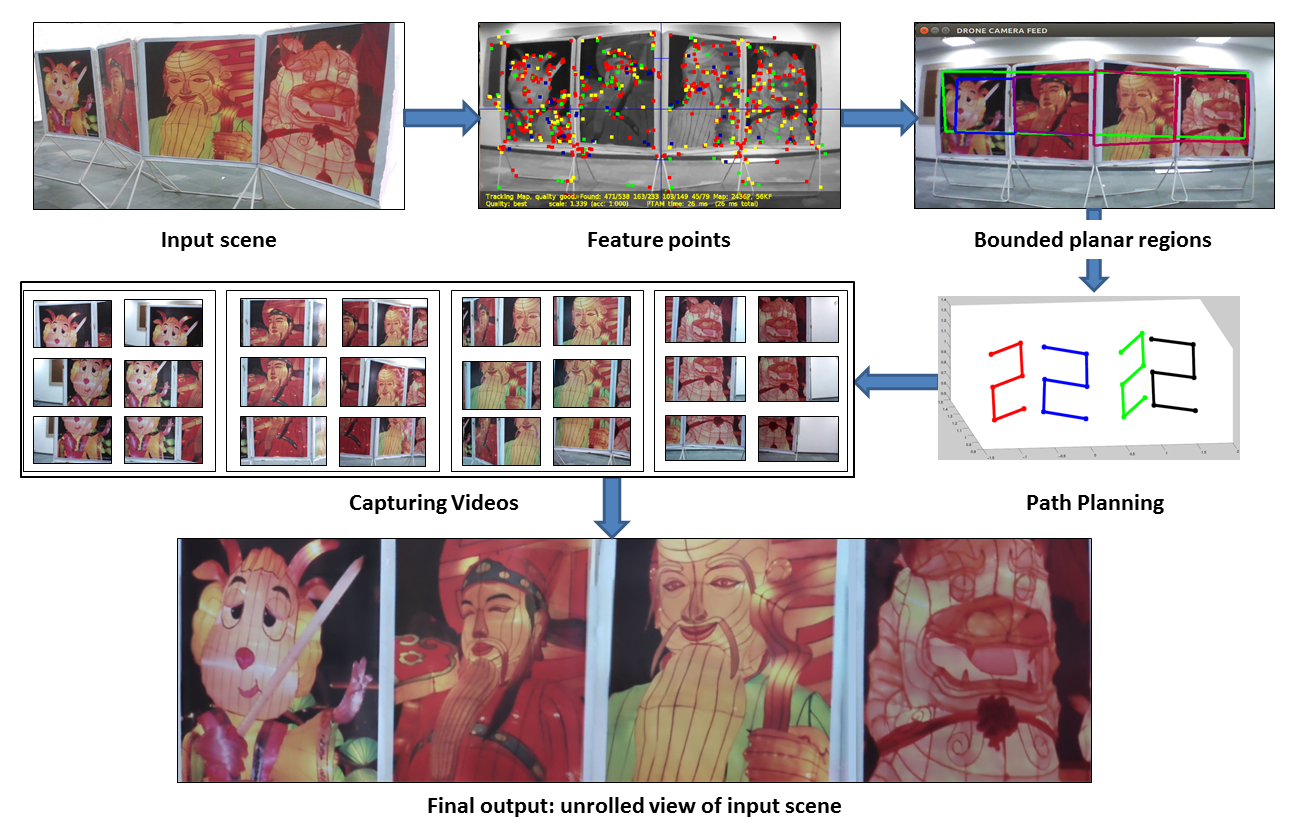
Overview
Overview of imaging multiplanar scenes.
We probe the input scene through a quadcopter and calculate the 3D positions of feature points
Next, we obtain multiplanar bounded regions corresponding to the area
marked by an user. Path planning is performed for each
planar bounded region to determine the camera positions in such a way that
images captured from those positions encompass the scene in an optimal manner.
The quadcopter is autonomously maneuvered along the estimated path and videos
are captured at target points. For each planar bounded region, the appropriate
frame from each video is found and then given to a mosaicing algorithm.
Finally, all mosaics are joined to get a full unrolled view.