Imaging large multiplanar scenes using a single quadcopter is difficult due to the insufficient power available in the
battery. Multiple quadcopters can be used in such scenarios to work in collaboration. We require a mechanism to identify each
quadcopter robustly.
Challenges
Generally, fiducials (markers) such as ARTag are used to identify
objects in an environment.
A problem with existing fiducials is that low-cost
quadcopters often exhibit very quick and erratic physical movements that result
in motion blur.
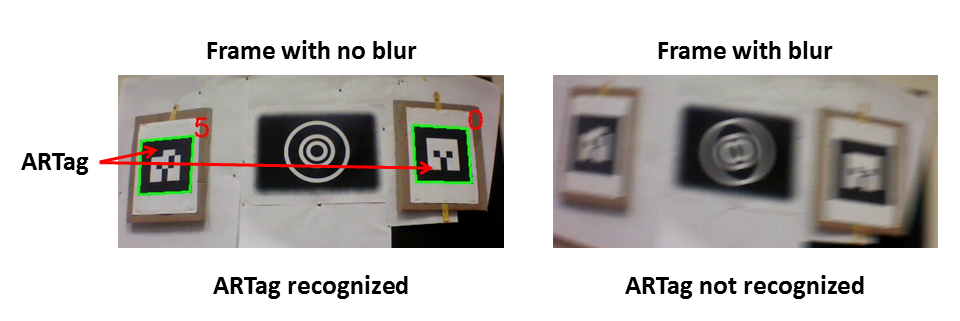
Fiducials
such as ARTag can be recognized (green rectangles) on the left, but cannot be
recognized (on the right) in the presence of motion blur.
This motion blur has an adverse effect on the recognition of fiducial
markers. This can be seen in above figure where the ARTag fiducial cannot be recognized due to motion blur.
The quadcopter uses the UDP protocol to transfer
videos from the quadcopter to the controlling device. As a result unpredictably many video frames are dropped, and this
causes discontinuities in the location of the pattern.
This makes it difficult to apply tracking algorithms which can exploit temporal coherence for determining the fiducial's position.
Contributions
We propose a fiducial that is designed to be resilient to motion blur.
Our design is based on the observation that motion blur from a quadcopter tends to be linear in nature.
When our fiducial is blurred, there is no blur in the direction perpendicular to the direction of motion.
This allows the signature of the fiducial to remain intact in any direction.
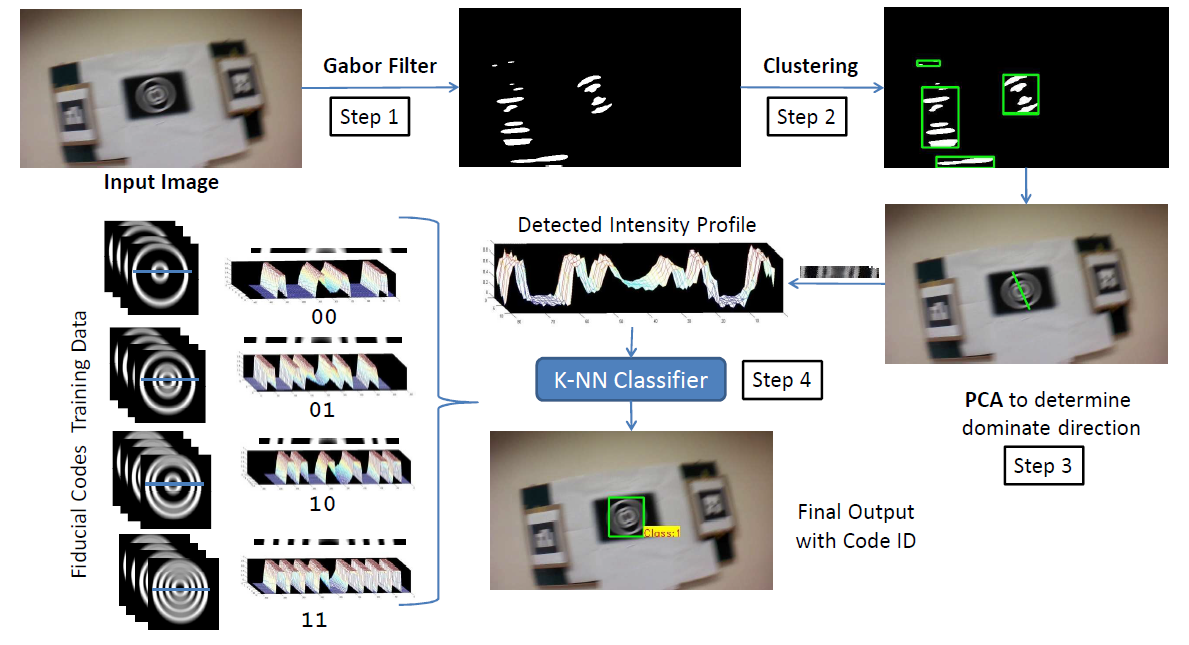
Overview
Overview of recognition of blur resilient fiducials.
In Step 1, we apply a Gabor filter on the image to isolate the potential locations of the pattern. In
Step 2, we find clusters of patches in the Gabor output. In Step 3, we perform
the Principal Component Analysis (PCA) on each cluster to find the dominant direction unaffected by the blur. Finally in Step 4, based on the direction
detected, we extract the intensity profile of the pattern and classify the fiducial.