What is this about?
This paper focuses on a method to construct panoramas captured from a quadcopter, and a new mosaicing sub-problem when the scene contains significant regions of vacant spaces. These vacant spaces yield little to no features to match input images making them challenging for existing mosaicing techniques.
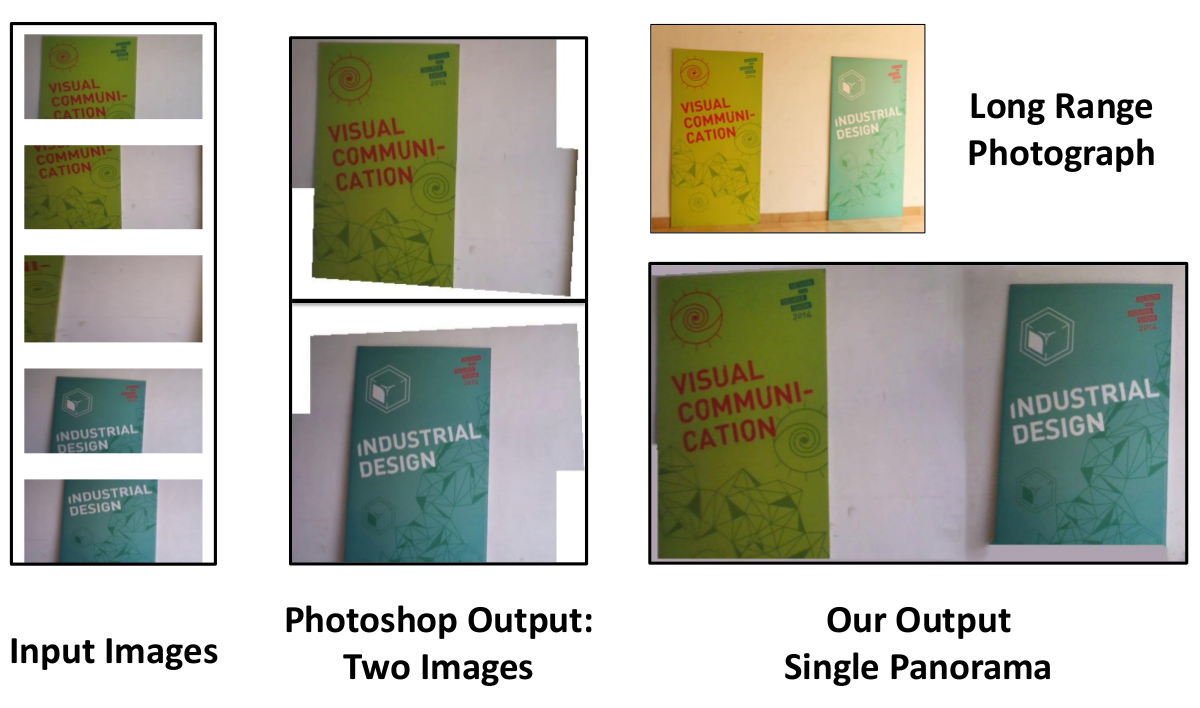
Observe in the picture above (leftmost column), that there is vacant space in the 3rd image confounding Photoshop (2nd column)
We describe a framework that is able to handle this unique input by leveraging the availability of the inertial measurement unit (IMU) data from the quadcopter.
Specifically, our method uses the accompanying IMU data to select a subset of images that contain interesting scene content. When the scene is such that this subset contains no vacant space, an appropriate panorama is effected; however, with featureless spaces, existing mosaicing methods do not work. In this paper, the subset is partitioned into multiple clusters, again using the IMU data. These subsets can now be stitched into a series of mini-panoramas, but a complete mosaic is not yet available. The gaps between these mini-panoramas represent regions of featureless spaces in the scene. Therefore, we once again use the IMU data together with a novel stereo reconstruction to determine appropriate portions of the images to complete the panorama. We demonstrate the efficacy of our approach on a number of input sequences that cannot to be mosaiced by existing methods.
Publications:
- Mosaicing Scenes with a Quadcopter [pdf], WACV, 2016.